
Pythonで強化学習(Reinforcement Learning, RL)を扱う場合、ライブラリ選定が学習効率・開発速度・将来の拡張性を大きく左右します。
本記事では、現在のPython強化学習エコシステムを 「環境API」「学習アルゴリズム実装」「分散・高速化」 の3層構造で整理し、それぞれの代表的ライブラリと適切な使いどころを詳しく解説します。
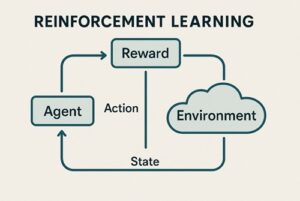
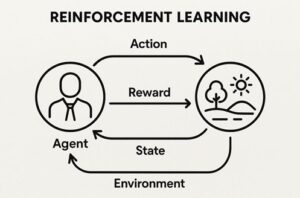
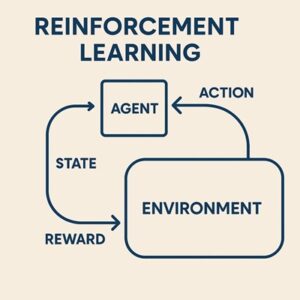
強化学習の基盤となる「環境API」
Gymnasium:事実上の標準となっている環境インターフェース
Gymnasiumは、かつて広く使われていたOpenAI Gymの設計思想を引き継いだ maintained fork です。
現在は、Gymnasiumが継続的にメンテナンスされる主要な環境APIの実装として位置づけられています。
- 観測空間(Observation Space)
- 行動空間(Action Space)
reset()/step()による明確なインターフェース
これらの設計により、アルゴリズム実装を差し替えても同一の環境で学習を回せる点が最大の利点です。
現在、Stable-Baselines3、RLlib、CleanRL、Tianshou など、多くの主要RLライブラリが Gymnasium互換 を前提に設計されています。
そのため、特別な理由がない限り、Pythonで強化学習を始める際の環境APIはGymnasiumを基準に考えるのが現実的です。
学習アルゴリズム実装ライブラリ(Agent側)
Stable-Baselines3(SB3):最も扱いやすい定番ライブラリ
Stable-Baselines3(SB3)は、PyTorchベースで実装された強化学習アルゴリズム集です。
- PPO / DQN / A2C / SAC / TD3 など主要手法を網羅
- 学習・評価・モデル保存まで一貫したAPI
- 実装の信頼性が高く、初学者から実務まで対応可能
特に「まず学習を動かしたい」「検証を素早く回したい」ケースでは、SB3は最短距離の選択肢になります。
SB3-Contrib
SB3本体には含まれない 実験的・拡張的アルゴリズム は、SB3-Contribとして分離提供されています。
安定性と拡張性を切り分けている点も、実務向けとして評価できます。
Ray RLlib:分散・大規模学習を前提としたフレームワーク
RLlibは、Rayエコシステム上に構築された強化学習フレームワークで、以下の特徴を持ちます。
- マルチGPU・マルチノード前提の分散学習
- フォールトトレラント設計
- マルチエージェント学習への正式対応
- 実験管理・スケールアウトが容易
研究用途というより、本番運用・大規模実験を想定した設計思想が強いライブラリです。
単体マシンでの軽量実験にはオーバースペックになりがちですが、規模が拡大するほど強みが際立ちます。
TorchRL:PyTorch公式系の柔軟なRLツールキット
TorchRLは、PyTorchエコシステムに自然に統合される形で設計された強化学習ライブラリです。
- 低レベルAPIから高レベル抽象まで提供
- データフロー・バッファ・環境ラッパーを部品として利用可能
- 論文実装・独自アルゴリズム開発に向く
「完成品ライブラリ」というより、RLシステムを構築するための部品群という位置づけが近く、研究開発寄りの用途に適しています。
CleanRL:理解しやすさを最優先した実験用実装
CleanRLは、1ファイル完結の高品質実装を特徴とする強化学習プロジェクトです。
- ブラックボックス化を極力排除
- 論文アルゴリズムの再現性が高い
- 学習・改変・検証がしやすい
APIの使いやすさよりも、「アルゴリズムを理解する」「自分で改造する」ことに重点を置く場合に非常に有用です。
Tianshou:汎用性と高速性のバランス型
Tianshouは、PyTorchベースの汎用強化学習フレームワークで、
- オンライン / オフラインRL
- マルチエージェント
- モデルベースRL
といった幅広い設定に対応しています。
「SB3より柔軟、RLlibより軽量」という立ち位置で、研究と実務の中間層に向いています。
マルチエージェント強化学習(MARL)
PettingZoo:マルチエージェント環境の事実上の標準API
PettingZooは、マルチエージェント強化学習向けの環境APIを提供するライブラリです。
- AEC(Agent Environment Cycle)
- Parallel API(同時行動)
という2つのモデルをサポートし、さまざまな対戦・協調タスクを表現できます。
RLlibなど主要フレームワークとの統合実績も豊富で、MARLを行う場合の環境APIとして最優先候補です。
学習を高速化する環境・物理シミュレーション
EnvPool:環境ステップのボトルネックを解消
EnvPoolは、C++実装による超高速な環境実行エンジンです。
- gym / dm_env 互換
- 大量並列ステップ実行
- Atari / MuJoCo などで高FPS
環境実行がボトルネックになっている場合、導入効果が非常に大きいライブラリです。
Brax:JAXベースの超並列物理シミュレーション
Braxは、Googleが開発したJAXベースの物理シミュレーション環境です。
- GPU / TPU向けの超並列実行
- 物理ベースタスクを高速に学習可能
- 学習アルゴリズムの例も含む
主目的は高速物理環境ですが、環境+学習スイートとしても利用できます。
dm_control:研究用途で定番の物理タスク群
DeepMind Control Suite(dm_control)は、MuJoCoを用いた物理ベース環境集です。
研究論文での採用例が多く、再現実験やベンチマーク用途に向いています。
用途別おすすめ構成まとめ
| 目的 | 推奨構成 |
|---|---|
| まず学習を動かす | Gymnasium + Stable-Baselines3 |
| 大規模・分散・本番運用 | Gymnasium / PettingZoo + RLlib |
| 論文再現・研究 | CleanRL / TorchRL / Acme |
| マルチエージェント | PettingZoo + RLlib |
| 高速物理・大量並列 | Brax / EnvPool |
まとめ
Pythonの強化学習ライブラリは成熟しており、「何をしたいか」さえ明確なら選択肢は自然に絞れます。
- 手軽さ重視 → Stable-Baselines3
- スケール重視 → RLlib
- 理解と改造 → CleanRL / TorchRL
- マルチエージェント → PettingZoo
- 高速化 → EnvPool / Brax
この記事を基準に、自身の目的に合ったスタックを組み立ててみてください。
以上、Pythonの強化学習で使えるライブラリについてでした。
最後までお読みいただき、ありがとうございました。